MaskControl: Spatio-Temporal Control for Masked Motion Synthesis
ICCV 2025 (Oral)
🏆 Award Candidate
[Previous Name] ControlMM: Controllable Masked Motion Generation
Ekkasit Pinyoanuntapong1,4, Muhammad Usama Saleem1, Korrawe Karunratanakul2, Pu Wang1, Hongfei Xue1, Chen Chen3, Chuan Guo4, Junli Cao4, Jian Ren4, Sergey Tulyakov4
1University of North Carolina at Charlotte, 2ETH Zurich, 3University of Central Florida, 4Snap Inc.
arXiv Code Youtube ICCV
TL;DR
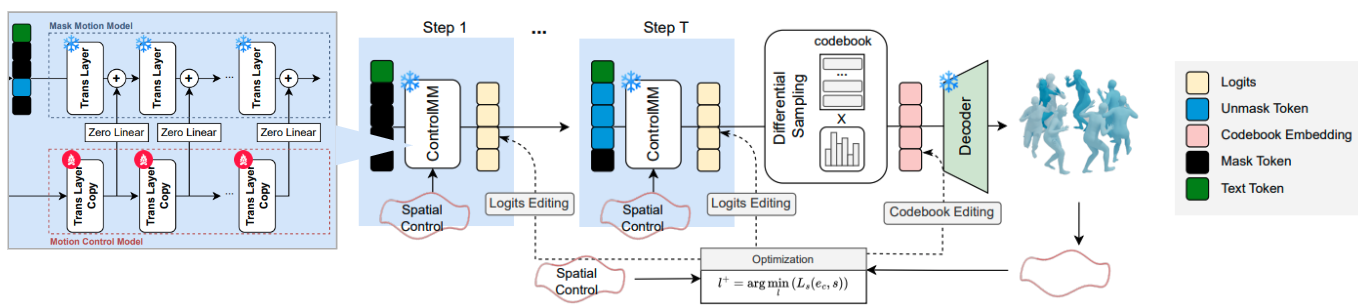
Masked Motion Models have shown superior quality and speed compared to Motion Diffusion Models. However, current SOTA methods for motion control primarily rely on Motion Diffusion Models. MaskControl is the first to introduce controllability to Masked Motion Models through two novel components:- Logits Regularizer (ControlNet-like for Masked Model)
- Logits Optimization (Inference time guidance for Masked Model)
Method
Compared to SOTA - Multiple Joints
a person crosses their arms for chest fly
MaskControl (our)
OmniControl
MotionLCM
a person jumps in the air once
MaskControl (our)
OmniControl
MotionLCM
a person walks in a circle
MaskControl (our)
OmniControl
MotionLCM
a person walks forward and waves his hands
MaskControl (our)
OmniControl
MotionLCM
Compared to SOTA - Pelvis Only
a person walks forward and waves his hands
MaskControl (our)
GMD
a person dances to salsa music
MaskControl (our)
GMD
a person walks forward and come back to the same position from where we started
MaskControl (our)
GMD
Compared to SOTA - Zero-shot Objective Control
a man slowly leaps forward, turns around and leaps again and then repeats the forward leap.
MaskControl (our)
ProMoGen
Compared to STMC for Body Part Timeline Control

MaskControl (our)
STMC
Dense Signals
the person draws a heart with hand
person walks down and up in a figure 8 pattern
A figure walks forward in a zig zag pattern
a person waves both his arms
someone is lifting something up
a person stands and waving
a man walks in a curved line with his hands at his sides
a person walks with support
a person walks
Sparse Signals
A person walks forward with their hands up in a surrender pose
person walks over and sits down in a chair.
A person jumps and kicks a football in the air with their head
A person walks forward, casually greeting others with a wave or hello
a man walks left and right
A person walks, pauses, and performs a high kick in the air.
Body Part Timeline Control
Generating motion for the upper body from frames 0 to 120 based on the “a person puts hands in the air.” For the lower body, motion is generated in two parts: From frames 0 to 60, based on the “a person kicks left legs.” From frames 60 to 120, based on the “a person jumps forward.”
Generating upper body motion from frames 0 to 120 based on the prompt: "the person is bending over forward" Simultaneously, lower body motion is generated from frames 0 to 120 based on the prompt: "shake with their left leg"
Obstacle Avoidance
the man walks zig zag.
the man walks forward in a straight line.
@inproceedings{Pinyoanuntapong2025MaskControl,
title = {MaskControl: Spatio-Temporal Control for Masked Motion Synthesis},
author = {Pinyoanuntapong, Ekkasit and Saleem, Muhammad and Karunratanakul, Korrawe and Wang, Pu and Xue, Hongfei and Chen, Chen and Guo, Chuan and Cao, Junli and Ren, Jian and Tulyakov, Sergey},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
pages = {9955--9965},
year = {2025}
}